
目次
通常ドローンはGNSS(全球測位衛星システム)を用いて測位して飛行していますが、大気の状態や地形によって誤差が発生します。
自動帰還時にその誤差を修正しないまま自動着陸させると思いがけない事故になりかねません。
現在販売されているドローンの一部機種は、下方ビジョンシステムで離陸時に地面の特徴を記憶します。そして着陸予定地点の特徴と照合し位置補正をすることで、GNSSの誤差が発生しても正確な自動着陸が可能となっています。
今回はAUTEL EVO II Pro V3 で自動帰還の着陸精度をテスト。
フライトアプリAUTEL EXPLORER内の設定項目「正確な着陸」がON / OFFでどう違うのか比較しました。
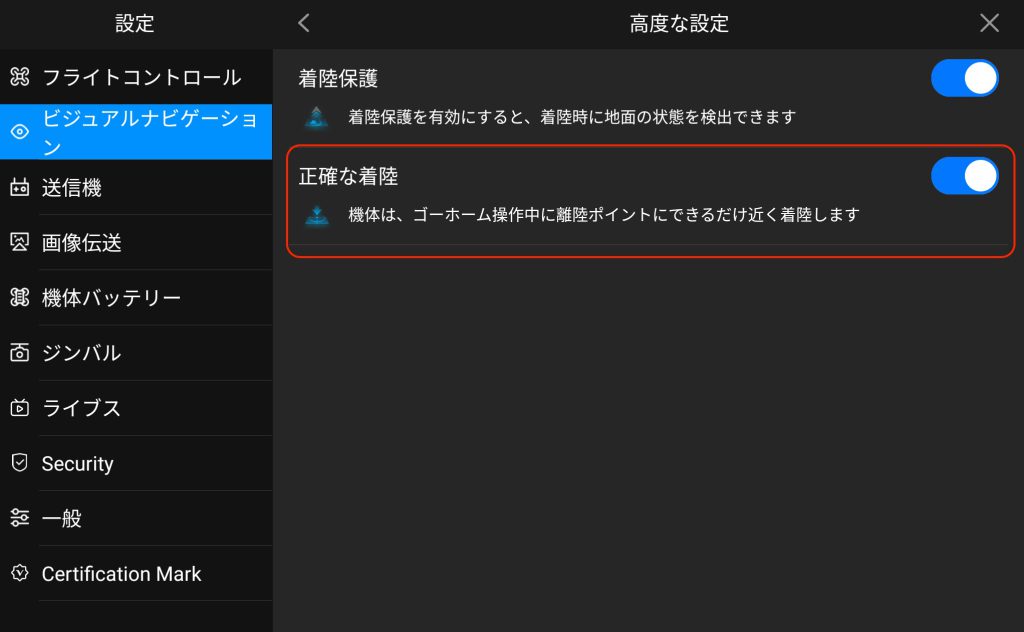
AUTEL EXPLORERの設定画面→ビジュアルナビゲーション→高度な設定→正確な着陸と進み、ONかOFFを選択します。
「正確な着陸」をONとOFFの両方で自動帰還させてみた比較動画です。
離着陸以外は早送りしてあります。
「正確な着陸」 OFFの場合、着陸の位置が機体2つ分ほど手前にずれたのがわかります。
補正をかけずにGNSSだけで測位した場合、このような誤差が生じます。
「正確な着陸」 ONの場合、着陸時に地上4mぐらいので地面の特徴を照合し、機体が自動で左に動きます。
結果として、離陸した位置に正確に着陸できました。
AUTEL EVO II Pro V3の正確な自動着陸がまぐれじゃない事を証明するために自動帰還を連続でやってみた結果、毎回ほぼ同じ位置に自動で着陸できました。
今回の実証実験でAUTEL EVO II Pro V3の自動帰還の精度はライバル機と比較しても遜色のないレベルだという事がわかりました。飛行時間や最高速などのスペックも大事ですが、地味な機能もしっかりと作り込んである事が安全なフライトに繋がると実感しました。
弊社ドローンショップにてデモ機を展示いたしております。
